Can you imagine a technology that could fight diseases in blood vessels, map out complex structures in the body, and measure toxic chemicals in the environment? The potential benefits of nanorobots (really really small robots designed to do things that humans are too big to do) are huge! But before nanorobots can be put into use, we first need to think how to best design them. It turns out, we can learn a lot about designing nanorobots by thinking about how larger robots operate.
No matter how big or small, robots go where we can’t go, do what we can’t do, and do repetitive work that we don’t want to do. To do these dangerous or tedious tasks, sometimes robots need to behave like humans. Recently, engineers from Drexel University designed a humanoid robot to throw out the first pitch at a Phillies baseball game (video clip below). Although it was a bad first pitch, the fact that engineers have designed robots to mimic human movement is quite impressive!
Thinking about how we design a robot to be a pitcher is a good analogy for how we might go about designing nanorobots to do other tasks. Pitching is the result of a set of complex movements and components, so if we design a robot with each of these features, it can (in theory) mimic the motion of a pitcher. Of course, there are pitching machines that can get the ball across the plate for practice, but they cannot accomplish the movements of a pitcher and so could never be used in a real game.

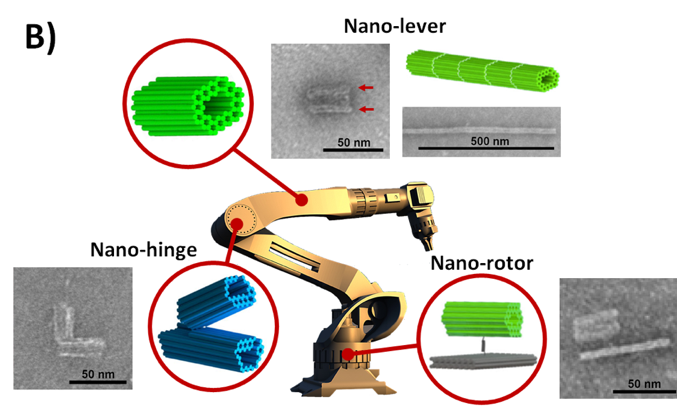
We can categorize the movements needed for our pitching robot roughly into three groups: first, we need levers, which are analogous to the four limbs of a pitcher. Then hinges, which are like the wrist, elbow, shoulder, hip, or ankle joints, are also an essential component. The last piece we need is the rotor. Rotation of the waist and shoulders are essential for a pitcher’s movement. Robots having the three components of levers, hinges, and rotors are already used in a wide range of fields, including assembling cars in an automotive factory (like that shown in Figure 2), exploring the deep sea, and in Mars rovers.1

The robots used as pitchers and in car factories are both large, but what if we could build nanoscale robots? What could we do with them? Well, nanodevices will be able to do many things that we cannot do because we are too big. For example, nanodevices are making their way into many medical applications to solve problems that larger scale devices cannot. There are a lot of nanoscale structures in our body (check out our blog post about “Nano in your ear” for one example of this), and nanodevices could allow us to explore and map complex nanoscale structures in the body, or to fight diseases in blood vessels.2
Researchers have already used what we know about robots on the large-scale to build a nanodevice having the three essential components of robot arms.3 They used the properties of DNA strands to build strong levers and joints. DNA’s strong double helix structure allowed the researchers to make “DNA origami”4 because, like traditional paper origami, it is a process to create new dimensions. For example, in traditional paper origami we fold two-dimensional paper to make three-dimensional structures.

In the same manner, scientists can build two- or three- dimensional structures with one-dimensional DNA molecules. Figure 4A shows the basic principle of DNA origami. As mentioned above, DNA strands (blue and red strands below) can form a double-helix structure through complementary interactions between building blocks. Instead of glue in origami, artificially designed “DNA staples” (green strands), which have an affinity for both of the others, are used to assemble DNA strands into higher dimensional structures. With this technique, the researchers have built bundles of DNA helices and used them as levers, and the affinity of the single strand was used to build hinges and rotors (Figure 4B).

So now that we have the starting structures for our nanorobots, the grand challenge of development remains: how can we make the devices move? Nanodevices are too small to have wires and batteries like big robots. But can we develop ways to control these small devices? The short answer is, “Yes, we can!”
One way to make the nanodevices move is with an external magnetic field. In the short clip below, it looks like the puppets are moving all by themselves, but actually it’s an external magnetic field that makes the puppets move.
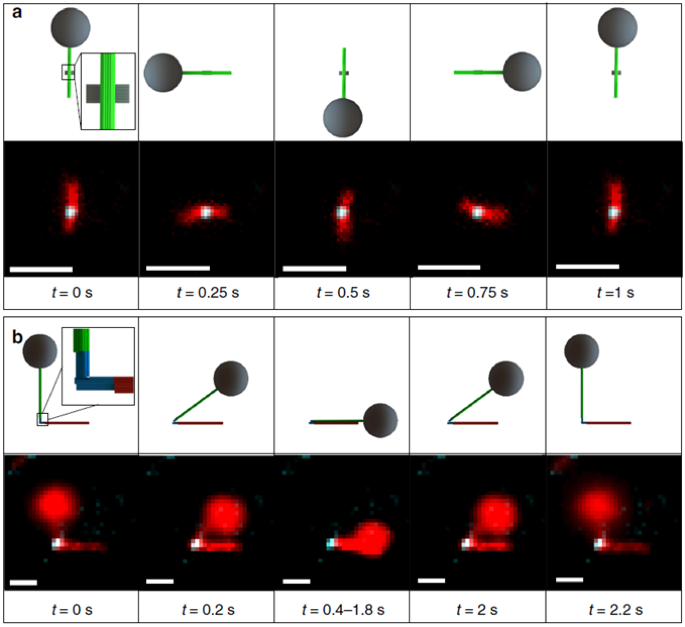
To make a responsive nanoscale system like these puppets, scientists attached tiny magnetic beads to the end of each DNA lever, and then turned on the magnetic field to move the levers. So now we have devices that are on the nanoscale AND can move!
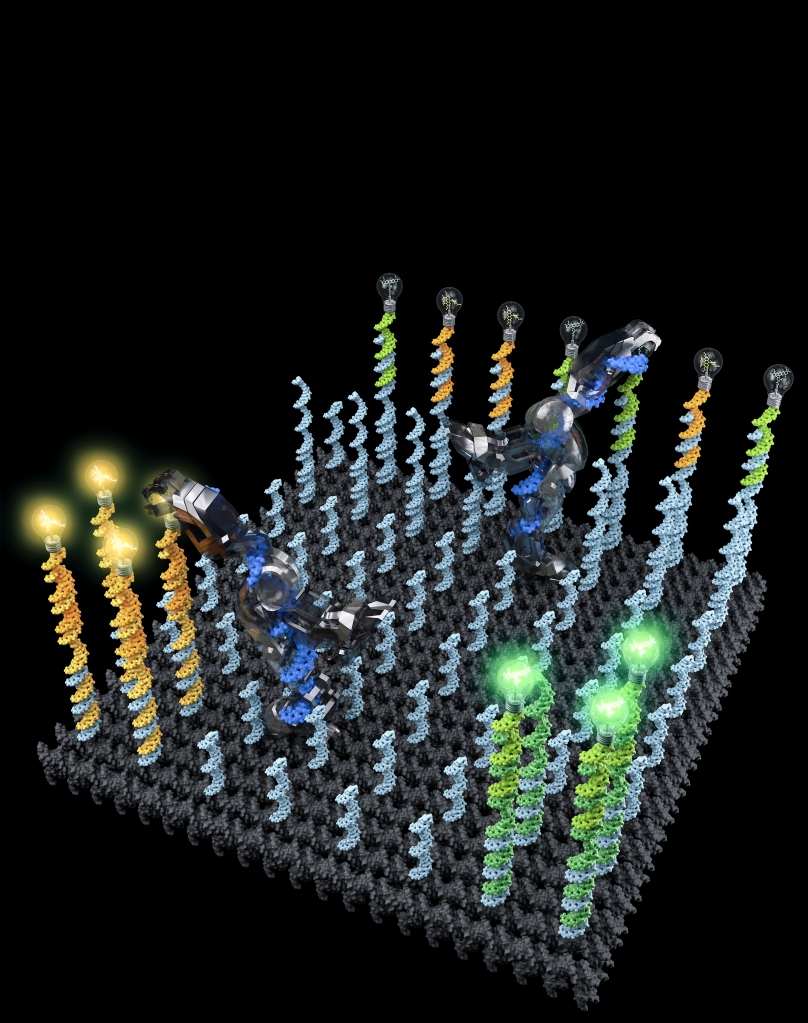
So, these devices are now small, capable of being controlled, and have the ability to move. The next step was to start to develop devices to move laterally or deliver cargo automatically.5 A team of researchers from CalTech have made an automated nanodevice with legs and arms that are composed of DNA strands as well. They have also built special stages for it, which are coated with DNA strands.
As I mentioned above, each of the building blocks of DNA strands on the stage have an affinity for their complementary blocks, so interactions between the DNA strands on the stage and DNA legs allows the nanodevice to stand and take steps across the stage. The arms of the nanodevice are also DNA single strands which were designed to have an affinity for different cargo molecules (dye molecules in this example) so that they can pick up and deliver cargo. This cargo could include medicine to fight germs, dissolve blood clots, or treat cancer in the body. In this study, it took more than 10 hours to sort and deliver six molecules using these automated nanodevices, and the scientists determined it was not easy to control them.
Ultimately, nanodevices must be improved to have more complex, faster, and more accurate movement before we can start to use them to solve medical and technological problems. But what is exciting is that we’ve been able to take what we know about robots on the large-scale and start to translate this technology to the nanoscale. So, what exactly does the future hold for nanorobots? Only time will tell, but perhaps in the near future we may not be able to imagine life without medicine delivered by nanorobots. After all, it’s hard to imagine our life today without cars and the robots that build them.

REFERENCES
- NASA Jet Propultion Laboratory. Mars Science Laboratory: Mars Curiosity Rover “Arm and Hand” N.D.
- English, T. Nanobots Will Be Flowing Through Your Body by 2030. Interesting Engineering, April 25, 2017.
- Lauback, S., et al. Real-time magnetic actuation of DNA nanodevices via modular integration with stiff micro-levers. Nature Communications, 2018, 9(1), 1446. doi: 10.1038/s41467-018-03601-5
- Rothemund, PW. Folding DNA to create nanoscale shapes and patterns. Nature, 2006, 440(7082): 297. doi: 10.1038/nature04586
- Thubagere A.J., et al. A cargo-sorting DNA robot. Science, 2017, 357(6356): eaan6558. doi: 10.1126/science.aan6558
- Reif, J. H. DNA robots sort as they walk. Science, 2017, 357(6356), 1095-1096. doi: 10.1126/science.aao5125

